Två ekvationer som relaterar 2D-sensorplanskoordinater till 3D-objektkoordinater
Ljusstrålar som passerar genom hålet på en
hålkamera
Kollinearitetsekvationerna är en uppsättning av två ekvationer, som används i fotogrammetri och datorstereoseende , för att relatera koordinater i ett sensorplan (i två dimensioner ) till objektkoordinater (i tre dimensioner). Ekvationerna härrör från den centrala projektionen av en punkt på objektet genom kamerans optiska centrum till bilden på sensorplanet.

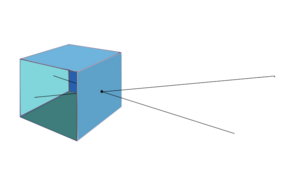
De tre punkterna P, Q och R projiceras på planet S genom projektionscentrum C

x- och z-axeln för projektionen av P genom projektionscentrum C
Definition
Låt x, y och z hänvisa till ett koordinatsystem med x- och y-axeln i sensorplanet. Beteckna koordinaterna för punkten P på objektet med  koordinaterna för bildpunkten för P på sensorplanet av x och y och koordinaterna för projektions (optiskt) centrum med
koordinaterna för bildpunkten för P på sensorplanet av x och y och koordinaterna för projektions (optiskt) centrum med  . Som en konsekvens av projektionsmetoden finns det samma fasta förhållande
. Som en konsekvens av projektionsmetoden finns det samma fasta förhållande  mellan
mellan  och
och  ,
,  och
och  och avståndet från projektionscentrum till sensorplanet
och avståndet från projektionscentrum till sensorplanet  och
och  . Därav:
. Därav:



Att lösa för i den sista ekvationen och skriva in den i de andra ger:


Punkten P ges normalt i något koordinatsystem "utanför" kameran av koordinaterna X , Y och Z , och projektionscentrum av  . Dessa koordinater kan transformeras genom en rotation och en translation till systemet på kameran. Översättningen påverkar inte skillnaderna mellan koordinaterna, och rotationen, ofta kallad kameratransform , ges av en 3×3- matris R , som transformerar
. Dessa koordinater kan transformeras genom en rotation och en translation till systemet på kameran. Översättningen påverkar inte skillnaderna mellan koordinaterna, och rotationen, ofta kallad kameratransform , ges av en 3×3- matris R , som transformerar  till:
till:


och

Substitution av dessa uttryck leder till en uppsättning av två ekvationer, kända som kollinearitetsekvationer :


Den mest uppenbara användningen av dessa ekvationer är för bilder inspelade med en kamera. I detta fall beskriver ekvationen transformationer från objektrymden (X, Y, Z) till bildkoordinater (x, y). Den ligger till grund för de ekvationer som används vid buntjustering . De indikerar att bildpunkten (på kamerans sensorplatta), den observerade punkten (på objektet) och kamerans projektionscentrum var inriktade när bilden togs.
Se även


