ASC-15

ASC -15 (Advance System Controller Model 15) var en digital dator utvecklad av International Business Machines (IBM) för användning på Titan II interkontinental ballistisk missil (ICBM). Den modifierades därefter och användes på bärraketerna Titan III och Saturn I Block II.
Dess huvudsakliga funktion på dessa raketer var att göra navigeringsberäkningar med hjälp av data från tröghetssensorsystem . Den utförde också beredskapskontroller före lanseringen. Det var en digital seriell processor som använde fixpunktsdata med 27-bitars ord. Lagringen var ett trumminne . Elektroniska kretsar var svetsade inkapslade moduler, bestående av diskreta motstånd , transistorer , kondensatorer och andra komponenter svetsade samman och inkapslade i ett skummaterial. Den tillverkades i IBM-fabriken i Owego , NY.
ASC-15 för Titan II
Det första tröghetsstyrsystemet för Titan II byggdes av AC Spark Plug och inkluderade en tröghetsmätenhet baserad på design från Draper Labs vid MIT , och ASC-15-datorn designad och byggd av IBM i Owego, NY. Den första Titan II-missilen som bar detta system lanserades 16 mars 1962. Att skaffa reservdelar till detta system blev svårt och flygvapnet beslutade att ersätta det med ett nytt system. AC Spark Plug-systemet, inklusive ASC-15, ersattes av Delco Electronics Universal Space Guidance System (USGS) på operativa Titan II-missiler med start i januari 1978. Styrdatorn i USGS var Magic 352, tillverkad av Delco.
ASC-15 byggdes på en aluminiumram på cirka 1,5x1,5x1 fot. Sidorna, toppen och botten täcktes av bitar av laminerad plast, täckta med guldpläterad aluminiumfolie. Dessa omslag var något konvexa och räfflade för styvhet. Inuti locken fanns femtiotvå logikstavar, var och en innehöll fyra svetsade inkapslade moduler. Dessa omgav en klockram som innehöll ett trumminne. Se figur 2.
Trumman var en tunnväggig cylinder av rostfritt stål 3 tum lång och 4,5 tum i diameter täckt med en magnetisk nickel-koboltlegering. Den drevs av en synkronmotor vid 6 000 rpm. Trumman hade 70 spår, varav 58 användes och 12 var reserv. Dessa spår användes enligt följande:
| NEJ. SPÅR | ANVÄNDNING AV SPÅR |
|---|---|
| 34 | Instruktionsspår |
| 7 | Konstanter |
| 8 | Måldata |
| 2 | Data för tillfällig lagring |
| 5 | Revolvrar för extra snabb åtkomstlagring |
| 2 | Timing spår |
Kapaciteten för ett spår var 1 728 bitar. Instruktionsord var 9-bitars långa och data lagrades i 27-bitarsord.
Sammanfallande med 58 spår var 67 läshuvuden och 13 skrivhuvuden. Medan trumman snurrade med 6 000 rpm, flöt huvudena ovanför trummans yta på ett tunt lager luft. När trumman snurrade upp eller saktade ner höjdes huvuden från trumman av kamaxlar som roterades av en kedja som drevs av en motor ovanpå trumhuset, för att undvika att den magnetiska ytan skadades. Se figur 3.
ASC-15 för Titan III
Titan III var ett rymdfarkost baserat på Titan II ICBM. ASC-15 behölls som fordonsstyrdator, men trumman förlängdes något för att ge 78 användbara spår, en ökning med 20 jämfört med trumman som användes i Titan II. Minnet innehöll 9 792 instruktioner (51 spår) och 1 152 konstanter (18 spår). Hastigheten var densamma som för Titan II: 100 varv/sekund × 64 ord/varv × 27 bitar/ord = 172,8 kilobit/sekund. Tiden för en additionsoperation var 156 μs ; för en multiplikation, 1,875 μs ; och för en division, 7 968 μs .
ASC-15 för Saturn I

Ingen vägledningsdator användes för Saturn I Block I (uppdrag SA-1, 2, 3 och 4). Styrsystemet för SA-2 visas i figur 4. Pitchprogrammet tillhandahölls av en kamanordning placerad i Servo Loop Amplifier Box. Händelseförloppet styrdes av en programenhet som även användes på Jupitermissiler. Detta var en 6-spårs bandspelare som skickade pulser till en uppsättning reläer (flygsekvenseraren) för att aktivera och avaktivera olika kretsar i en exakt tidsbestämd sekvens.
ASC-15 flögs först på SA-5, det första Saturn I Block II-fordonet och det första som uppnådde omloppsbana. Det var en passagerare på detta uppdrag, som inte vägledde fordonet utan genererade testdata för senare utvärdering. Det aktiva vägledningssystemet på SA-5 liknade det för tidigare flygningar. Passagerarsystemet var ASC-15 och ST-124 tröghetsplattform . Vägledningen var öppen slinga; det vill säga vägledningskommandon var endast tidsfunktioner. SA-5 såg också introduktionen av instrumentenheten .
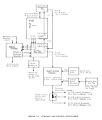
På SA-6, medan ST-90S-styrning med öppen slinga användes för det första steget (SI), använde ST-124 och ASC-15 efter separation banadaptiv vägledning (sluten slinga) för att styra det andra steget (S-IV) . SA-6-styrsystemet visas i figur 5. Effektiviteten hos den adaptiva vägledningen visades oavsiktligt när för tidig avstängning av S-IV-motor nummer åtta praktiskt taget ingen effekt på fordonets bana.
Arrangemanget av ST-90S- och ST-124-systemen (inklusive ASC-15-styrdatorn) på SA-6 visas i figur 6. Detta är version 1 av instrumentenheten, som flög på SA-5, 6, och 7.
På SA-7 styrde ST-124-systemet avfyrningen av båda stegen. Styr- och kontrollsystemet för SA-7 visas i figur 7. Den digitala datorn är ASC-15. Den ersatte både kamenheten som innehöll SI-tiltprogrammet för tidigare uppdrag och programenheten som kontrollerade händelseförloppet på dessa uppdrag.
Nästa uppdrag som flögs efter SA-7 var SA-9. Den bar en ny version av instrumentenheten, en som var trycklös och 2 fot (0,61 m) kortare än version 1. Version 2 flög på de återstående Saturn I-uppdragen (SA-8, 9 och 10). [ citat behövs ]
Galleri

Missile Guidance Computer (MGC) för Titan II.

Sprängvy av MGC.

Trumminne för ASC-15

SA-2 styrsystem

SA-6 styr- och kontrollsystem

Instrumentenhet för SA-6
SA-7 styr- och kontrollsystem

SA-8 instrumentenhet under uppbyggnad vid Marshall Space Flight Center (MSFC)

Detalj av SA-8 instrumentenhet, med dummies märkta för ASC-15 och ST-124.






.jpg)

Anteckningar
- USAF Sheppard Technical Training Center. "Studentstudieguide, missiluppskjutning/missilofficer (LGM-25)." maj 1967. Sidorna 61–65. Tillgänglig på WikiMedia Commons
- Stumpf, David K. (1 januari 2000). Titan II: A History of a Cold War Missile Program . University of Arkansas Press. s. 63–65. ISBN 978-1-55728-601-7 .
- Bilstein, Roger E. (1980). Stages to Saturn: A Technological History of the Apollo/Saturn Launch Vehicles . ISBN 0-16-048909-1 . NASA SP-4206. Som PDF .
- Olsen, PF; Orrange, RJ (september 1981). "Realtidssystem för federala tillämpningar. En översyn av betydande teknisk utveckling" ( PDF) . IBM J. Res. Dev . 25 (5): 405–416. doi : 10.1147/rd.255.0405 .
- Cooper, AE; Chow, WT (januari 1976). "Utveckling av rymddatorsystem ombord". IBM Journal of Research and Development . 20 (1): 5–19. Bibcode : 1976IBMJ...20....5C . CiteSeerX 10.1.1.95.2866 . doi : 10.1147/rd.201.0005 .
- Larson, Paul O. (1965). "Titan III tröghetsstyrningssystem". AIAA:s andra årsmöte, San Francisco, 26–29 juli 1965 . AIAA-papper. s. 1–11. 65-306.
- Liang, AC; Kleinbub, DL (augusti 1973). "Navigering av rymdfarkosten Titan IIIC med hjälp av Carousel VB IMU". AIAA Guidance and Control Conference, Key Biscayne, FL, 20–22 . AIAA-papper. 73-905.
- "Saturnus I Sammanfattning" . NASA MSFC. 15 februari 1966. hdl : 2060/19660014308 . Hämtad 2022-05-06 .
- Saturn Flight Evaluation Working Group (22 september 1964). "Resultat från den femte Saturn I Launch Vehicle Test Flight (SA-5)" (PDF) . NASA MSFC. MPR-SAT-FE-64-17. Arkiverad från originalet (PDF) den 19 juli 2021 . Hämtad 7 juli 2017 .
- Saturn Flight Evaluation Working Group (1 oktober 1964). "Resultat från den sjätte Saturn I Launch Vehicle Test Flight (SA-6)" (PDF) . NASA MSFC. MPR-SAT-FE-64-18. Arkiverad från originalet (PDF) den 19 juli 2021 . Hämtad 7 juli 2017 .
- Saturn Flight Evaluation Working Group (30 december 1964). "Resultat av den sjunde Saturn I Launch Vehicle Test Flight (SA-7)" (PDF) . NASA MSFC. MPR-SAT-FE-64-19. Arkiverad från originalet (PDF) den 16 mars 2021 . Hämtad 7 juli 2017 .
- Delsystems tillförlitlighetsstatus UTKAST (PDF) . Apollo Systems tillförlitlighetsstatusrapport. Vol. 2. NASA. 23 september 1963.
-
NASA (mars 1971). "Rymdburna digitala datorsystem". NASA SP-8070.
{{ citera journal }}: Citera journal kräver|journal=( hjälp )
externa länkar
- "Titan II missil dator" . IBM Archives: Rymdfärdskronologi . 23 januari 2003.
- Weik, Martin H. (mars 1961). "En tredje undersökning av inhemska elektroniska digitala datorsystem" . Ballistic Research Laboratories, Aberdeen Proving Ground, Maryland. s. 58–59. Rapport nr 1115. Denna sida innehåller en länk till en bild av en svetsad inkapslad modul. Det står också att ASC 15 står för Advance System Controller Model 15.
|
Vägledningsdatorer
| |
|---|---|
| På bemannade rymdfarkoster | |
| På bärraketer |
|